 新北市109年度智慧學習領航學校遴選計畫撰寫建議
新北市109年度智慧學習領航學校遴選計畫撰寫建議
作者:塾長 日期:2019-12-30 14:20

 「STEAM與AIR的距離~我的Kebbi Air探究與實作」演講分享
「STEAM與AIR的距離~我的Kebbi Air探究與實作」演講分享
作者:塾長 日期:2019-12-17 15:31

RT與小北椅凳玩想
作者:塾長 日期:2019-12-03 14:52
相隔兩週二,來了三次靠小北的麥當勞吃大麥克,總會順道逛一下小北。
今天向星爺致敬仿玩,《食神》裡的經典「好折凳! 折凳的奧妙之處,它可以藏在民居之中,隨手可得,還可以坐著它來隱藏殺機,就算被警察抓了也告不了你,真不愧為七種武器之首!」
椅子就是椅子,德音國小這週六30校慶,快搬板凳坐好!

中間有個洞,可以插杆,倒過來是個容器,可以當大聲公,雙椅平放紙箱或白板可以當桌腳。四面像窗格可以透空或貼面。多張椅子可以連結串接,全都相同或是不同表現,可以依據真正的情境目標與目的,解決什麼問題、提升滿足、創造價值的場域在哪裡呢?

幫凱比裝箱不錯,布置個家也不錯。做個底盤,拉起後包椅帶走。有需要的話可以鋸短。
 |  |  |
今天也RT了一番~讀者劇場、機器人與玩具、將退休的老師、想再熱血更多....

機器人首課
作者:塾長 日期:2019-12-02 08:39
校慶週開外掛,介紹數位攝影、360相機與軟體後,來上一堂機器人介紹,先利用相片、影片(手控扭動萬向輪車 、凱比群舞 、推骨牌值日生)介紹,再拿有小組數量的機器人讓孩子們把玩討論~
 |  |  |
 |  |  |
 |  |  |
利用「聲、光、動、辨、情、智」六面向,看看機器人可以表現的樣貌:
聽覺:藉由喇叭可以播放聲音,聲音的形式可以是數位合成或自然的語音、樂音。藉由麥克風可以收音,能進行錄音、接收語音指令,或是自然對話互動。
視覺:機器人本身具有發光部位,具備螢幕可以呈現多媒體內容或作為臉部表現、選單互動。具備鏡頭可以拍攝相片或錄製影片,可以進行識別應用。
行動:機器人的可移動性,包括身上具備多少個自由度,可以靈活展現像人一般的肢體活動,表現姿勢,在環境空間中移動,可結合主題式地圖或配件,表現意圖與展現行為。機器人身上也有觸碰感應,因觸摸而引發功能表現與動作。
辨識:感知,主要是利用多種感知器(sensor),除了上述的麥克風、鏡頭、觸碰感應,也可以結合各種內、外部感應器,連結IoT,藉由感知、辨識,讓機器人具備多元、可擴充的互動功能。
情感:情緒的接收與表現,結合聲音、發光、表情、姿勢與動作,表達情緒樣貌,如耍萌、開心或難過。另外,也期待能藉由多重辨識來識別使用者的情緒狀態,進而適切互動。情感的功能與應用,主要在於與使用者發生關聯、共感。探索機器人有一個恐怖谷理論(維基百科)可參考:由於機器人與人類在外表、動作上相似,所以人類亦會對機器人產生正面的情感;直到一個特定程度,他們的反應便會突然變得極為負面。
智能:機器人有多聰明?這也可說是對於人工智慧應用的期盼。沒有AI技術的機器人,它的表現乏善可陳;而機器人也是AI展現全方位功能樣貌、扮演邊緣運算中心的最佳載體。此外,我更關注:如何設計、提供貼心而專屬的服務,無論是產品端或教學規劃,都是我探索學習AIR(AI與機器人)教育、教育AIR 的本心初衷。
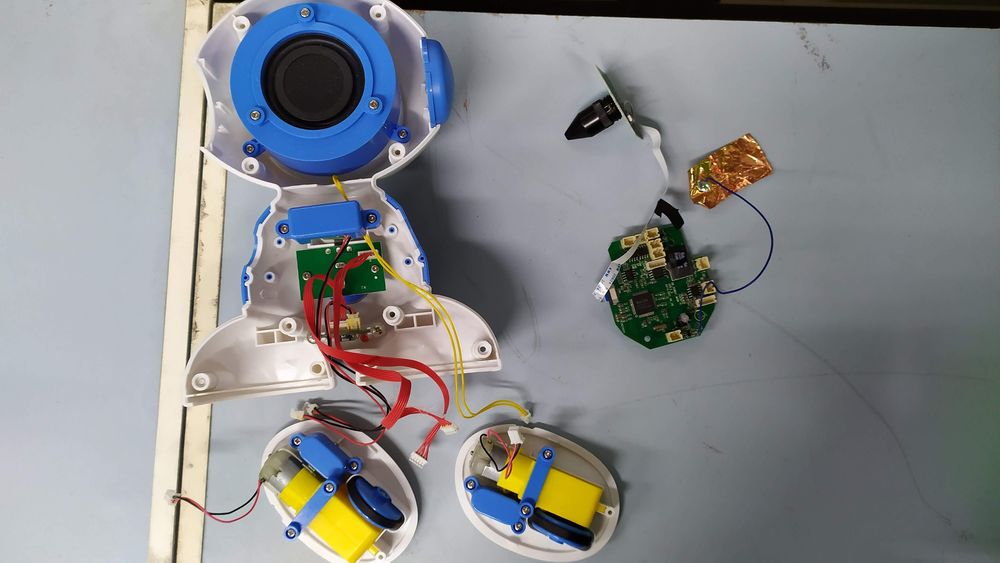
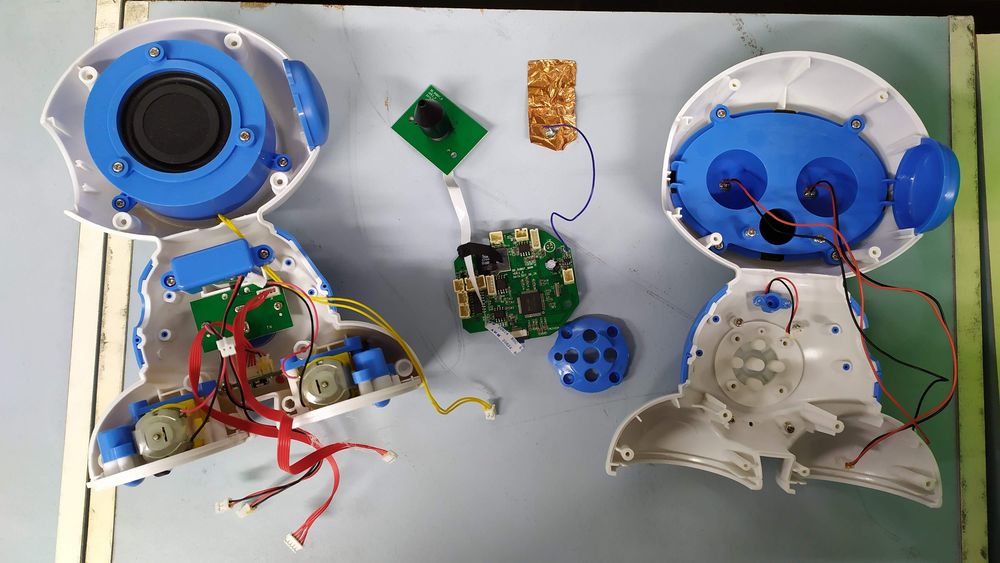
再從創客學習力指標來解析一個機器人的組成及運作、服務:
(參考圖待改寫)

恐怖谷理論

|
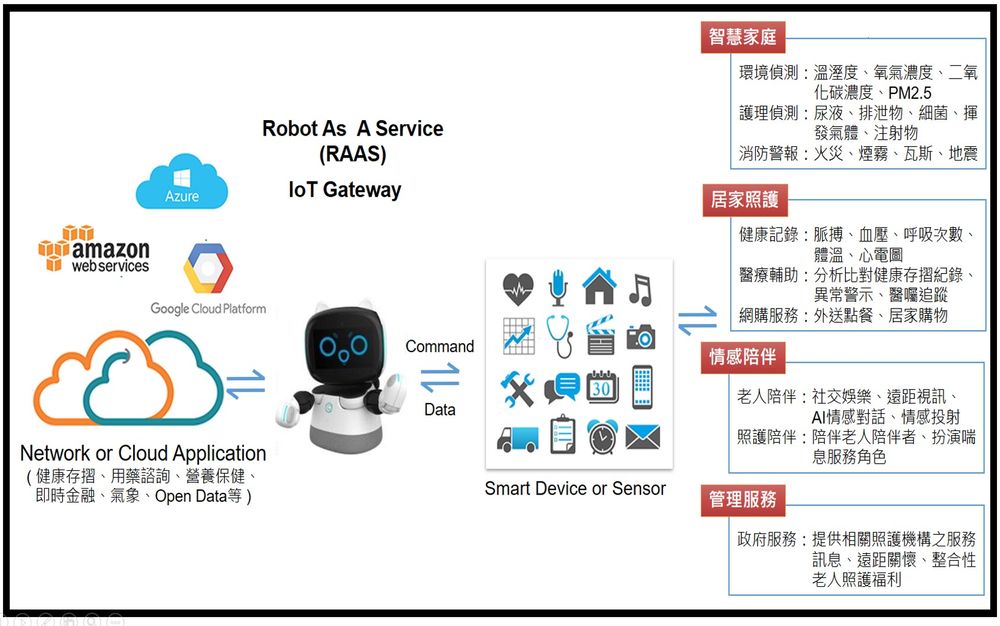
AIoT物聯網應用 |
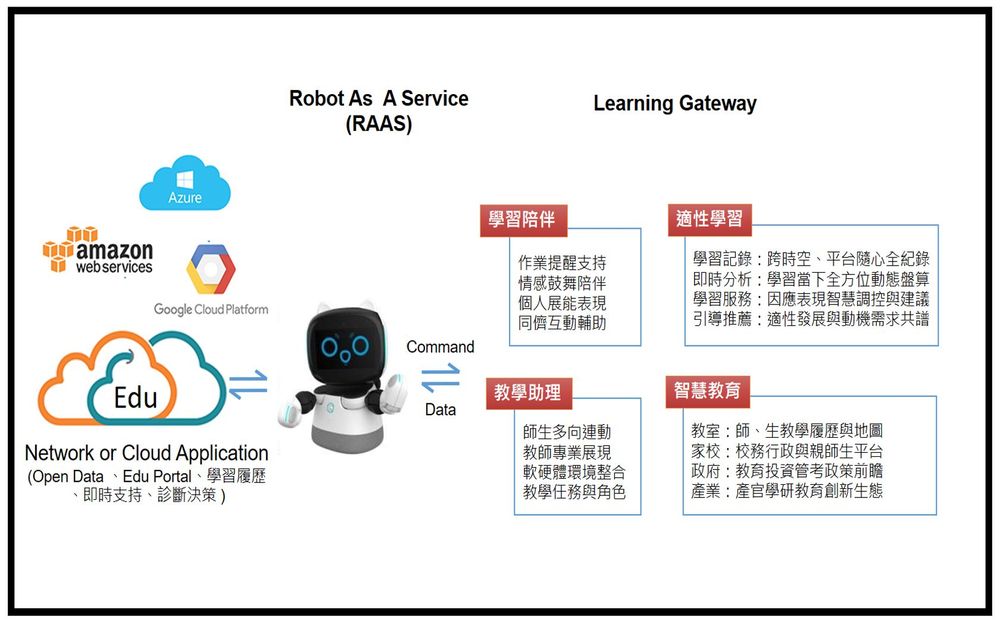
智慧教育想望 |
- 1

